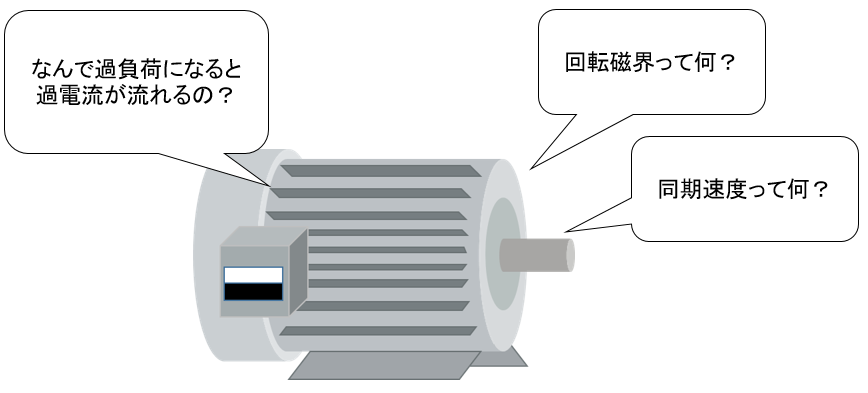
誘導電動機(以下モーターと記載)ってご存じでしょうか?
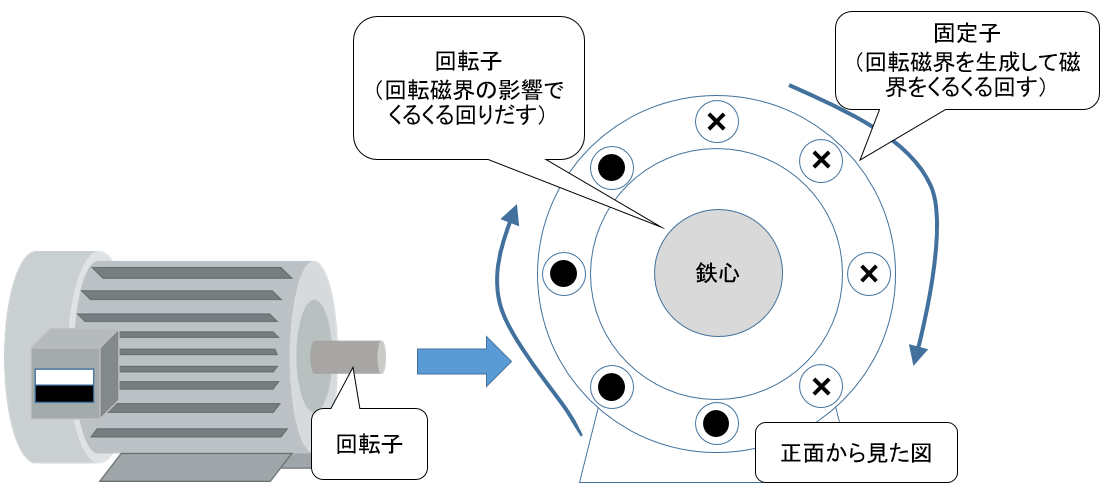
三相交流電流をモーターの固定子の電機子巻線に流して回転磁界を作ります。
その結果、回転磁界が回転子を回転させます。
文章だけだと伝わらないですね。詳しくは、また別の記事で紹介しますのでお待ちください
誘導電動機(モーター)が過負荷になると
モーターが過負荷になるとどうなるでしょうか?
工場で勤めてると、モーター内部のベアリングが固着して、
軸が固定されて過負荷になった!!!と言う体験をするかと思います。
つまり、モーターがロックすると電流がいっぱい流れる!!
つまり、固定子の磁界で回転子を回せなくなると過電流が流れる!!
と言うことになります。
この状態がどう言う事かといいますと
すべりが大きくなっているということです。
滑っているんです。
すべりとは?
すべりとは、回転子の回転が固定子の回転磁界より遅れ(滑り)ている状態の事です。
モーターとは、固定子の回転磁界がくるくる回ります。
その影響により、回転子がくるくる回ります。
滑りと言うのは、式で表すと
S:すべり(単位なし)
Ns:同期速度(rpm)
N:回転数 (rpm)
Nはモーターの軸の回転数を表しています
Nsは同期速度と言い、回転磁界の回転数を表しています。
Nsの式は、
f:周波数(Hz)
p:極数 (極)
周波数はご存じかと思いますが、極数については馴染みがないかと思います。
モーターの中にある磁極の数です。
極数と言うのは、下の図のオレンジ色の部分です。
この場合は、8極となります。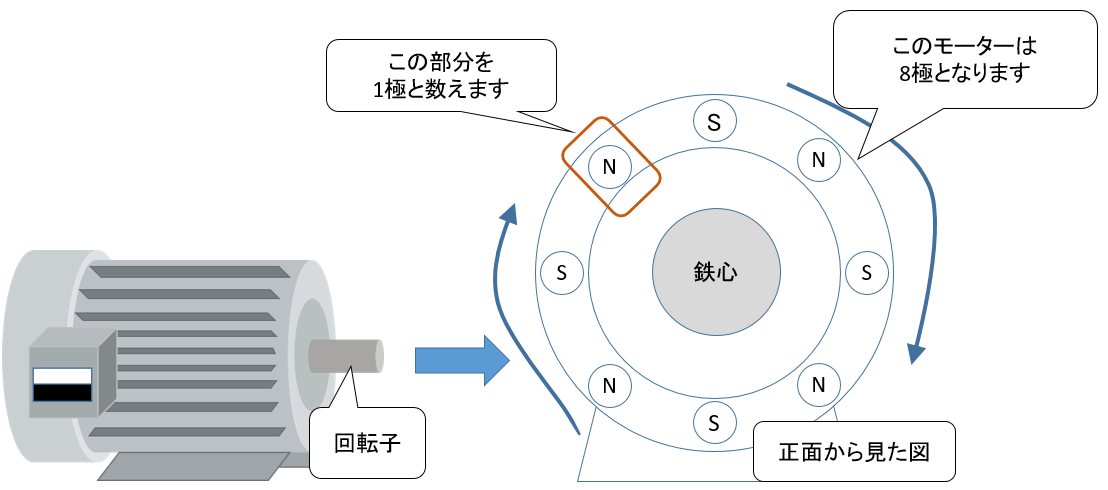
この場合、同期速度(Ns)は、下の式のように900となります。
.png)
何故過負荷になるのか?
モーターの電流の式は下記の様に記載できます。
電流Iが大きくなり、サーマルの整定値以上になると
過負荷となります。
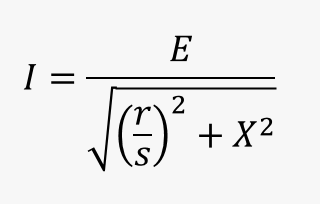
I:電流 (A)
E:電圧 (V)
r:抵抗 (Ω)
S:すべり (単位無し)
X:リアクタンス(Ω)
この式の特徴は、右辺の分母に存在している S です。
もし、モーターの軸(回転子)がベアリングの損傷により
ロックされてしまったら、回転数(N)は0となります。
つまり滑り値は1となります。
それでは過負荷時(すべり1)と通常時(すべり0.03)を
計算式を用いて比較してみましょう。
通常時(電圧200V / 抵抗(R)10Ω / リアクタンス(X) 10Ωで計算)
.png)
過負荷時(電圧200V / 抵抗(R)10Ω / リアクタンス(X) 10Ωで計算)
.png)
この二つの式を比べると
過負荷時は約23.57倍の電流が流れることが分かります。
モーターの回転軸がロックされると大量の電流が流れ
電気配線やモーターを損傷させる可能性が発生します。
皆さんもモーターから異音などの異変に気付いた場合は、早急な対応をお願い致します。
まとめ
① モーターは回転磁界を作り、その回転磁界が回転子を回転させる
② モーターが過負荷になると過電流が流れる
その場合、通常の約23.5倍の電流が流れる
参考文献
① 電験三種、これでOK
https://yaku-tik.com/denken/k-synchronous-speed-and-slip/